Note
Go to the end to download the full example code or to run this example in your browser via Binder.
Using geometric transformations#
In this example, we will see how to use geometric transformations in the context of image processing.
import math
import numpy as np
import matplotlib.pyplot as plt
from skimage import data
from skimage import transform
Basics#
Several different geometric transformation types are supported: similarity, affine, projective and polynomial. For a tutorial on the available types of transformations, see Types of homographies.
Geometric transformations can either be created using the explicit parameters (e.g. scale, shear, rotation and translation) or the transformation matrix.
First we create a transformation using explicit parameters:
tform = transform.SimilarityTransform(scale=1, rotation=math.pi / 2, translation=(0, 1))
print(tform.params)
[[ 6.123234e-17 -1.000000e+00 0.000000e+00]
[ 1.000000e+00 6.123234e-17 1.000000e+00]
[ 0.000000e+00 0.000000e+00 1.000000e+00]]
Alternatively you can define a transformation by the transformation matrix itself:
matrix = tform.params.copy()
matrix[1, 2] = 2
tform2 = transform.SimilarityTransform(matrix)
These transformation objects can then be used to apply forward and inverse coordinate transformations between the source and destination coordinate systems:
[[6.123234e-17 3.000000e+00]]
[[ 0.000000e+00 -6.123234e-17]]
Image warping#
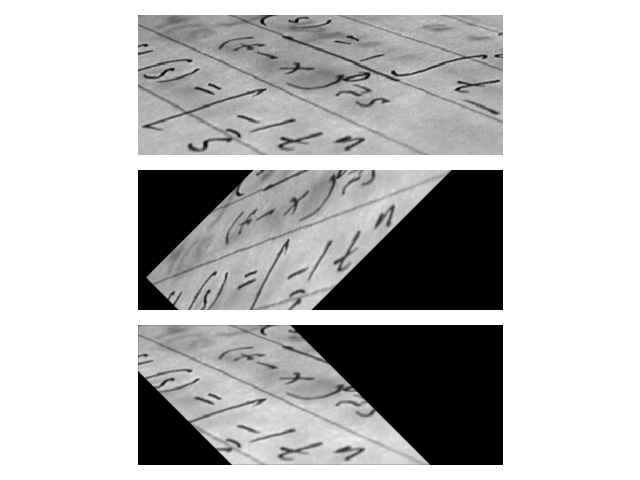
Geometric transformations can also be used to warp images:
text = data.text()
tform = transform.SimilarityTransform(
scale=1, rotation=math.pi / 4, translation=(text.shape[0] / 2, -100)
)
rotated = transform.warp(text, tform)
back_rotated = transform.warp(rotated, tform.inverse)
fig, ax = plt.subplots(nrows=3)
ax[0].imshow(text, cmap=plt.cm.gray)
ax[1].imshow(rotated, cmap=plt.cm.gray)
ax[2].imshow(back_rotated, cmap=plt.cm.gray)
for a in ax:
a.axis('off')
plt.tight_layout()
Parameter estimation#
In addition to the basic functionality mentioned above you can also generate a transform by estimating the parameters of a geometric transformation using the least squares method.
This can amongst other things be used for image registration or rectification, where you have a set of control points or homologous/corresponding points in two images.
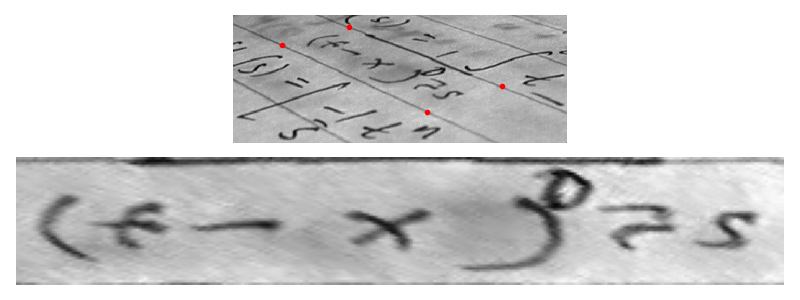
Let’s assume we want to recognize letters on a photograph which was not taken from the front but at a certain angle. In the simplest case of a plane paper surface the letters are projectively distorted. Simple matching algorithms would not be able to match such symbols. One solution to this problem would be to warp the image so that the distortion is removed and then apply a matching algorithm:
Note
For many transform types, including the ProjectiveTransform, it is
possible for the estimation to fail. If this is the case,
from_estimate returns a special object of type FailedEstimation.
This object describes the reason for the failure and can be tested for.
The following is a typical pattern to handle failed estimations
explicitly:
See Failed estimation below for more details.
warped = transform.warp(text, tform3, output_shape=(50, 300))
fig, ax = plt.subplots(nrows=2, figsize=(8, 3))
ax[0].imshow(text, cmap=plt.cm.gray)
ax[0].plot(dst[:, 0], dst[:, 1], '.r')
ax[1].imshow(warped, cmap=plt.cm.gray)
for a in ax:
a.axis('off')
plt.tight_layout()
plt.show()
The above estimation relies on accurate knowledge of the location of points and an accurate selection of their correspondence. If point locations have an uncertainty associated with them, then weighting can be provided so that the resulting transform prioritises an accurate fit to those points with the highest weighting. An alternative approach called the RANSAC algorithm is useful when the correspondence points are not perfectly accurate. See the Robust matching using RANSAC tutorial for an in-depth description of how to use this approach in scikit-image.
Failed estimation#
There are situations where transform classes can fail to estimate a valid transformation, and we recommend that you always check for this possible case.
If estimation succeeds, the result you get back will be a valid estimated
transform. You can check if you have a valid transform by truth testing.
E.g., the estimation from the previous section tform3 is valid and truthy:
bool(tform3)
True
However, if estimation failed, the from_estimate method returns a
special object of type FailedEstimation. Here is an example of a failed
estimation, where all the input points are the same:
/opt/hostedtoolcache/Python/3.12.12/x64/lib/python3.12/site-packages/numpy/_core/numeric.py:475: RuntimeWarning:
invalid value encountered in cast
FailedEstimation('ProjectiveTransform: Scaling generated NaN values')
This object type is falsey—meaning that:
bool(bad_tform)
False
You can access the raw message string of the failure with
str(bad_tform)
'ProjectiveTransform: Scaling generated NaN values'
We recommend that you put in a routine check to confirm the estimation succeeded:
if not bad_tform:
raise RuntimeError(f'Failed estimation: {bad_tform}')
Of course, there may be times, where you did not check the truthiness of
the estimation, and you nevertheless try to use the returned estimate. In
this case, you’ll get a FailedEstimationAccessError—a custom
subclass of a AttributeError.
Total running time of the script: (0 minutes 0.630 seconds)