Note
Go to the end to download the full example code or to run this example in your browser via Binder.
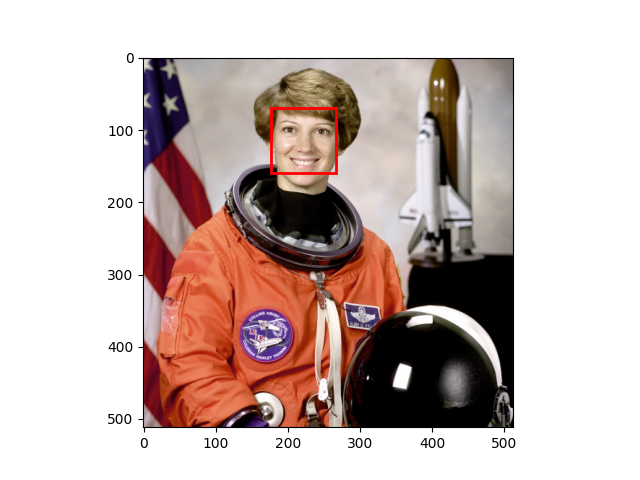
Face detection using a cascade classifier#
This computer vision example shows how to detect faces on an image using object detection framework based on machine learning.
First, you will need an xml file, from which the trained data can be read. The framework works with files, trained using Multi-block Local Binary Patterns Features (See MB-LBP) and Gentle Adaboost with attentional cascade. So, the detection framework will also work with xml files from OpenCV. There you can find files that were trained to detect cat faces, profile faces and other things. But if you want to detect frontal faces, the respective file is already included in scikit-image.
Next you will have to specify the parameters for the detect_multi_scale
function. Here you can find the meaning of each of them.
First one is scale_ratio. To find all faces, the algorithm does the search
on multiple scales. This is done by changing the size of searching window. The
smallest window size is the size of window that was used in training. This size
is specified in the xml file with trained parameters. The scale_ratio
parameter specifies by which ratio the search window is increased on each
step. If you increase this parameter, the search time decreases and the
accuracy decreases. So, faces on some scales can be not detected.
step_ratio specifies the step of sliding window that is used to search for
faces on each scale of the image. If this parameter is equal to one, then all
the possible locations are searched. If the parameter is greater than one, for
example, two, the window will be moved by two pixels and not all of the
possible locations will be searched for faces. By increasing this parameter we
can reduce the working time of the algorithm, but the accuracy will also be
decreased.
min_size is the minimum size of search window during the scale
search. max_size specifies the maximum size of the window. If you know the
size of faces on the images that you want to search, you should specify these
parameters as precisely as possible, because you can avoid doing expensive
computations and possibly decrease the amount of false detections. You can save
a lot of time by increasing the min_size parameter, because the majority of
time is spent on searching on the smallest scales.
min_neighbor_number and intersection_score_threshold parameters are
made to cluster the excessive detections of the same face and to filter out
false detections. True faces usually have a lot of detections around them and
false ones usually have single detection. First algorithm searches for
clusters: two rectangle detections are placed in the same cluster if the
intersection score between them is larger then
intersection_score_threshold. The intersection score is computed using the
equation (intersection area) / (small rectangle ratio). The described
intersection criteria was chosen over intersection over union to avoid a corner
case when small rectangle inside of a big one has small intersection score.
Then each cluster is thresholded using min_neighbor_number parameter which
leaves the clusters that have a same or bigger number of detections in them.
You should also take into account that false detections are inevitable and if you want to have a really precise detector, you will have to train it yourself using OpenCV train cascade utility.
import skimage as ski
import matplotlib.pyplot as plt
from matplotlib import patches
# Load the trained file from the module root.
trained_file = ski.data.lbp_frontal_face_cascade_filename()
# Initialize the detector cascade.
detector = ski.feature.Cascade(trained_file)
img = ski.data.astronaut()
detected = detector.detect_multi_scale(
img=img, scale_factor=1.2, step_ratio=1, min_size=(60, 60), max_size=(123, 123)
)
fig, ax = plt.subplots()
ax.imshow(img, cmap='gray')
for patch in detected:
ax.axes.add_patch(
patches.Rectangle(
(patch['c'], patch['r']),
patch['width'],
patch['height'],
fill=False,
color='r',
linewidth=2,
)
)
plt.show()
Total running time of the script: (0 minutes 0.318 seconds)