Note
Go to the end to download the full example code or to run this example in your browser via Binder
Robust line model estimation using RANSAC#
In this example we see how to robustly fit a line model to faulty data using the RANSAC (random sample consensus) algorithm.
Firstly the data are generated by adding a gaussian noise to a linear function. Then, the outlier points are added to the data set.
RANSAC iteratively estimates the parameters from the data set. At each iteration the following steps are performed:
Select
min_samplesrandom samples from the original data and check whether the set of data is valid (seeis_data_validoption).Estimate a model on the random subset (
model_cls.estimate(*data[random_subset]) and check whether the estimated model is valid (seeis_model_validoption).Classify all the data points as either inliers or outliers by calculating the residuals using the estimated model (
model_cls.residuals(*data)) - all data samples with residuals smaller than theresidual_thresholdare considered as inliers.If the number of the inlier samples is greater than ever before, save the estimated model as the best model. In case the current estimated model has the same number of inliers, it is considered as the best model only if the sum of residuals is lower.
These steps are performed either a maximum number of times or until one of the special stop criteria are met. The final model is estimated using all the inlier samples of the previously determined best model.
import numpy as np
from matplotlib import pyplot as plt
from skimage.measure import LineModelND, ransac
rng = np.random.default_rng()
# generate coordinates of line
x = np.arange(-200, 200)
y = 0.2 * x + 20
data = np.column_stack([x, y])
# add gaussian noise to coordinates
noise = rng.normal(size=data.shape)
data += 0.5 * noise
data[::2] += 5 * noise[::2]
data[::4] += 20 * noise[::4]
# add faulty data
faulty = np.array(30 * [(180., -100)])
faulty += 10 * rng.normal(size=faulty.shape)
data[:faulty.shape[0]] = faulty
# fit line using all data
model = LineModelND()
model.estimate(data)
# robustly fit line only using inlier data with RANSAC algorithm
model_robust, inliers = ransac(data, LineModelND, min_samples=2,
residual_threshold=1, max_trials=1000)
outliers = (inliers == False)
# generate coordinates of estimated models
line_x = np.arange(-250, 250)
line_y = model.predict_y(line_x)
line_y_robust = model_robust.predict_y(line_x)
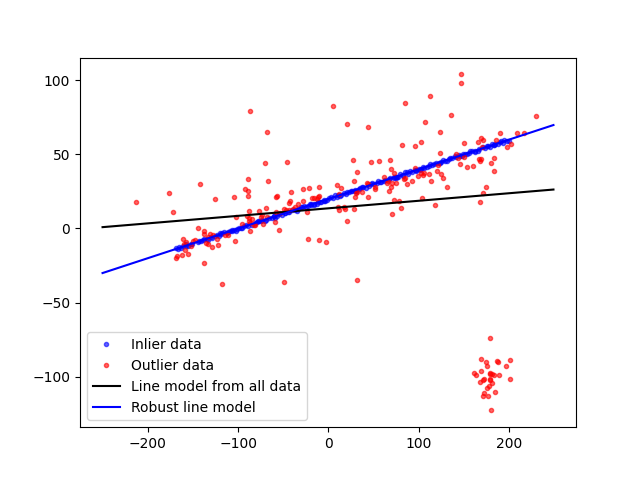
fig, ax = plt.subplots()
ax.plot(data[inliers, 0], data[inliers, 1], '.b', alpha=0.6,
label='Inlier data')
ax.plot(data[outliers, 0], data[outliers, 1], '.r', alpha=0.6,
label='Outlier data')
ax.plot(line_x, line_y, '-k', label='Line model from all data')
ax.plot(line_x, line_y_robust, '-b', label='Robust line model')
ax.legend(loc='lower left')
plt.show()
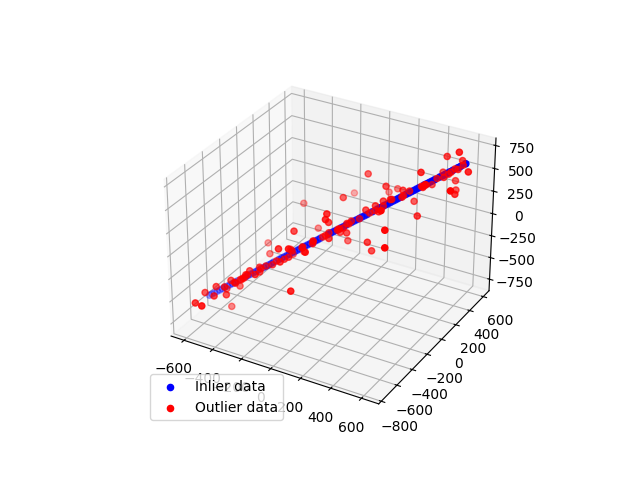
Now, we generalize this example to 3D points.
import numpy as np
from matplotlib import pyplot as plt
from skimage.measure import LineModelND, ransac
# generate coordinates of line
point = np.array([0, 0, 0], dtype='float')
direction = np.array([1, 1, 1], dtype='float') / np.sqrt(3)
xyz = point + 10 * np.arange(-100, 100)[..., np.newaxis] * direction
# add gaussian noise to coordinates
noise = rng.normal(size=xyz.shape)
xyz += 0.5 * noise
xyz[::2] += 20 * noise[::2]
xyz[::4] += 100 * noise[::4]
# robustly fit line only using inlier data with RANSAC algorithm
model_robust, inliers = ransac(xyz, LineModelND, min_samples=2,
residual_threshold=1, max_trials=1000)
outliers = inliers == False
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.scatter(xyz[inliers][:, 0], xyz[inliers][:, 1], xyz[inliers][:, 2], c='b',
marker='o', label='Inlier data')
ax.scatter(xyz[outliers][:, 0], xyz[outliers][:, 1], xyz[outliers][:, 2], c='r',
marker='o', label='Outlier data')
ax.legend(loc='lower left')
plt.show()
Total running time of the script: (0 minutes 0.549 seconds)