Note
Go to the end to download the full example code or to run this example in your browser via Binder
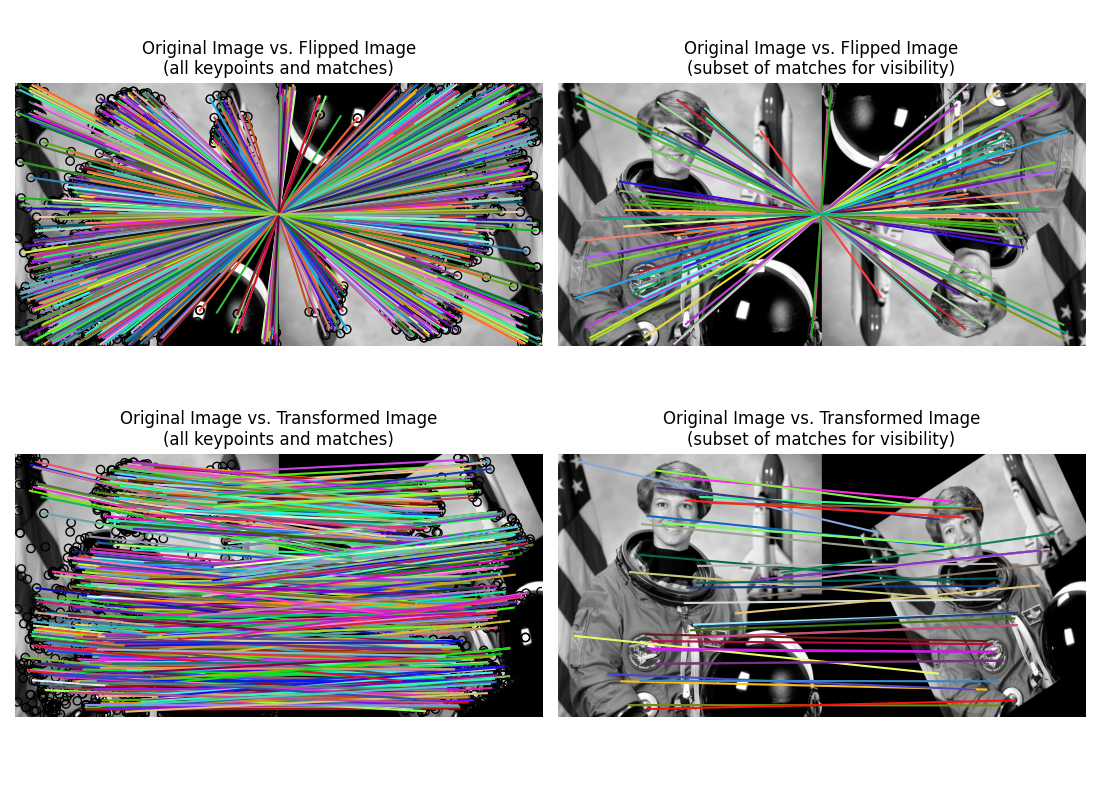
SIFT feature detector and descriptor extractor#
This example demonstrates the SIFT feature detection and its description algorithm.
The scale-invariant feature transform (SIFT) [1] was published in 1999 and is still one of the most popular feature detectors available, as its promises to be “invariant to image scaling, translation, and rotation, and partially in-variant to illumination changes and affine or 3D projection” [2]. Its biggest drawback is its runtime, that’s said to be “at two orders of magnitude” [3] slower than ORB, which makes it unsuitable for real-time applications.
References#
import matplotlib.pyplot as plt
from skimage import data
from skimage import transform
from skimage.color import rgb2gray
from skimage.feature import match_descriptors, plot_matches, SIFT
img1 = rgb2gray(data.astronaut())
img2 = transform.rotate(img1, 180)
tform = transform.AffineTransform(scale=(1.3, 1.1), rotation=0.5,
translation=(0, -200))
img3 = transform.warp(img1, tform)
descriptor_extractor = SIFT()
descriptor_extractor.detect_and_extract(img1)
keypoints1 = descriptor_extractor.keypoints
descriptors1 = descriptor_extractor.descriptors
descriptor_extractor.detect_and_extract(img2)
keypoints2 = descriptor_extractor.keypoints
descriptors2 = descriptor_extractor.descriptors
descriptor_extractor.detect_and_extract(img3)
keypoints3 = descriptor_extractor.keypoints
descriptors3 = descriptor_extractor.descriptors
matches12 = match_descriptors(descriptors1, descriptors2, max_ratio=0.6,
cross_check=True)
matches13 = match_descriptors(descriptors1, descriptors3, max_ratio=0.6,
cross_check=True)
fig, ax = plt.subplots(nrows=2, ncols=2, figsize=(11, 8))
plt.gray()
plot_matches(ax[0, 0], img1, img2, keypoints1, keypoints2, matches12)
ax[0, 0].axis('off')
ax[0, 0].set_title("Original Image vs. Flipped Image\n"
"(all keypoints and matches)")
plot_matches(ax[1, 0], img1, img3, keypoints1, keypoints3, matches13)
ax[1, 0].axis('off')
ax[1, 0].set_title("Original Image vs. Transformed Image\n"
"(all keypoints and matches)")
plot_matches(ax[0, 1], img1, img2, keypoints1, keypoints2, matches12[::15],
only_matches=True)
ax[0, 1].axis('off')
ax[0, 1].set_title("Original Image vs. Flipped Image\n"
"(subset of matches for visibility)")
plot_matches(ax[1, 1], img1, img3, keypoints1, keypoints3, matches13[::15],
only_matches=True)
ax[1, 1].axis('off')
ax[1, 1].set_title("Original Image vs. Transformed Image\n"
"(subset of matches for visibility)")
plt.tight_layout()
plt.show()
Total running time of the script: (0 minutes 6.684 seconds)